In questo progetto è stato realizzato un APR (drone) dalle seguenti caratteristiche:
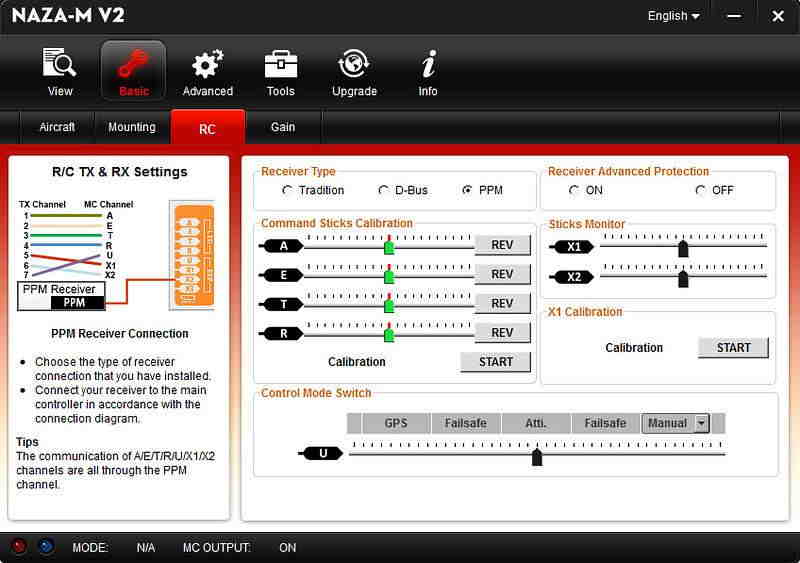
Il modello del flight controller (scheda di volo) utilizzato è il NAZA V2 un sistema proprietario della DJI (famosa azienda produttrice di droni). Tale scheda viene fornita insieme al GPS e il Compass che si trovano nello stesso case e ad un modulo (power module) che prendendo in ingresso l'energia delle batterie, la distribuisce ai vari dispositivi previo adattamento dei livelli di tensione . Inoltre è presente un ulteriore dispositivo che consente sia il collegamento del cavo seriale proveniente dal PC (per i settaggi), sia di visualizzare lo stato attuale del flight controller in volo attraverso un led multicolore ad alta luminosità.

Per consentire la visualizzazione dei dati di volo durante la missione, direttamente sull'immagine restituita dalla fotocamera, è stato acquistato un ulteriore modulo chiamato miniOSD (On Screen Display). Tale dispositivo è molto utile se mentre si vola si vogliono tenere sotto controllo parametri critici come ad esempio l'autonomia residua della batteria, l'intensità del segnale radio, il rateo di salita e discesa ed altri ancora; infatti il tutto viene impresso sullo stream video che viene poi inviato al ricevitore il quale a sua volta lo invierà al dispositivo deputato alla visualizzazione (tablet, smartphone, glasses).


Per effettuare i vari settaggi la DJI mette a disposizione un software gratuito che consente di interfacciarsi con il flight controller utilizzando una connessione seriale.
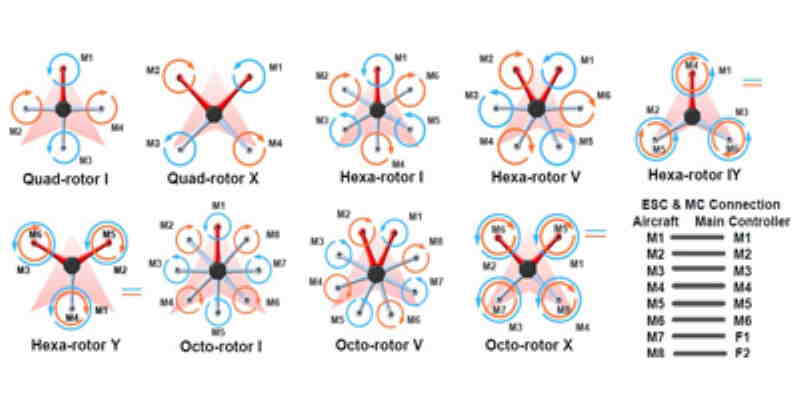
La configurazione del drone è "Quadricottero X" il che significa che i bracci sono disposti come una X e che il punto di riferimento (verso in cui punta il drone) si trova tra due bracci.
Il telaio è costituito da quattro tubolari che sono tenuti insieme da due piastre il tutto in fibra di carbonio e supporti in alluminio per l'alloggiamento dei motori ed il fissaggio dei tubolari.

Nella parte sottostante è stato aggiunto il supporto per l'atterraggio (landing gear) in plastica con piedini in neoprene.

La fotocamera è montata su un supporto chiamato "Gimbal" che oltre mantenerne la posizione orizzontale durante i cambiamenti di assetto del drone, consente anche il controllo della rotazione sui due assi di rollio e di beccheggio agendo su due trim dedicati che si trovano sulla radio.

La propulsione ed il controllo di assetto del drone è garantita da quattro coppie motore-elica montati ai quattro vertici della struttura ad "X"; il modello dei motori è T-Motor 470 KV 330W del tipo brushless a cassa rotante (outrunner)

mentre le eliche (due sinistre e due destre) hanno un diametro pari a 11" ed un passo da 4.7".

L'energia per l'alimentazione di tutti i dispositivi è garantita da due batterie LIPO da tre celle (3S1P) da 2700 mAh l'una connesse in serie per ottenere una configurazione a sei celle (6S1P).

I regolatori di velocità (ESC) dei motori hanno una corrente nominale di 30A e una corrente di picco di 40A lavorano ad una frequenza di 600 Hz e possono essere alimentati con pacchi batterie da 2 fino a 6 celle. Il modello è : YUKI MODEL CAYENNE SimonK BL-ESC 30A 600Hz Opto Controller.

L'energia viene veicolata dalle batterie agli ESC da una PDB (Power Distribution Board) della quale ne esistono diverse tipologie in funzione della configurazione del drone (Quadricottero, Esacottero, Octacottero...). Nel progetto in questione, data la configurazione del drone, è stata utilizzata la PDB per quadricotteri.

Infine per il controllo del drone si è utilizzata una radio a 8 canali modello Turnigy 9x.


Lo stream audio-video della fotocamera viene inviato al tablet (o smartphone) da una coppia TX/RX (Trasmettitore/Ricevitore) wireless (senza fili) operante alla frequenza dei 2,4 GHz (frequenza libera)


Di seguito si presentano alcune immagini del drone assemblato seguite da alcuni video.




